Sometimes there is a requirement to have the current nearest tip-to-tower distance as an input to the External Controller DLL. However, it is not available directly as a controller input via the API or swap array.
This distance is not available as a standard input, but a good approximation of this value can be calculated within your DLL code based on other inputs. The recommended method for calculating tip-to-tower distance is summarised in this article. Instead of testing every tower member, we suggest you initially do a visual inspection of the turbine to determine which member is the one that the blade tip passes nearest to. For example in the 5MW Tripod project...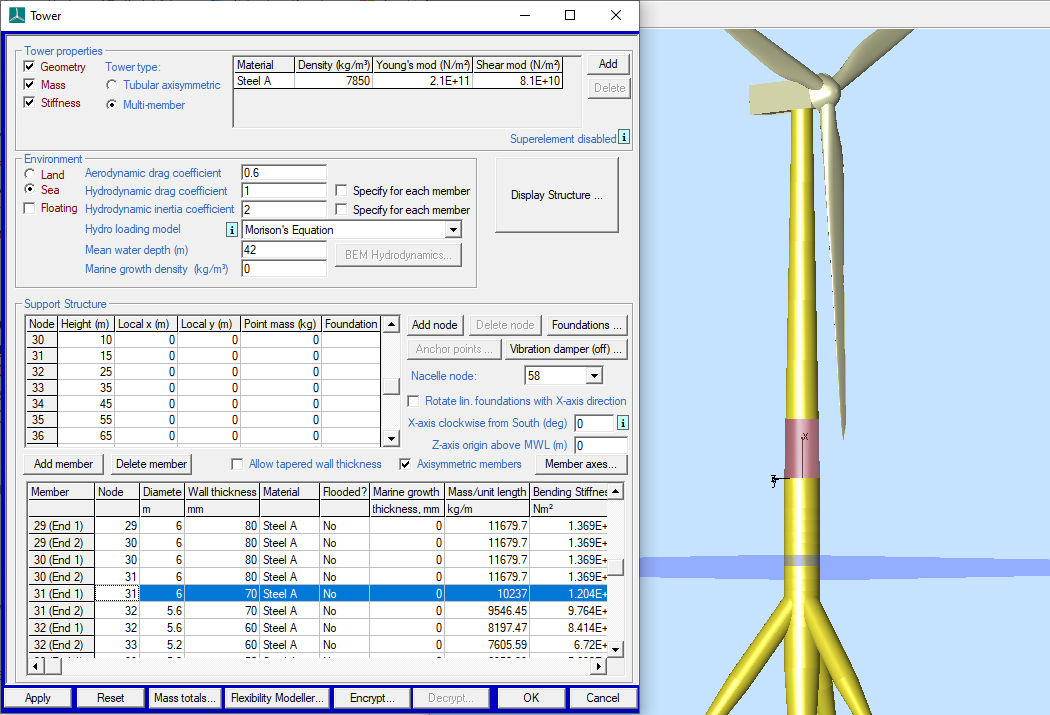
You can see here that the member to focus on is number 31. Its endpoints are at (0,0,15) and (0,0,25) in global coordinates. Admittedly these are the undeflected coordinates so it will vary by a few cm during the run. Therefore the calculated blade tip-to-tower distance will be an approximation, although the error will be quite small.
Getting the blade tip global position requires the following steps:
1. Make sure "Blade motion" at the tip station is enabled in the Specify -- Outputs -- Blade outputs screen (using the "Select Outputs" button), like this: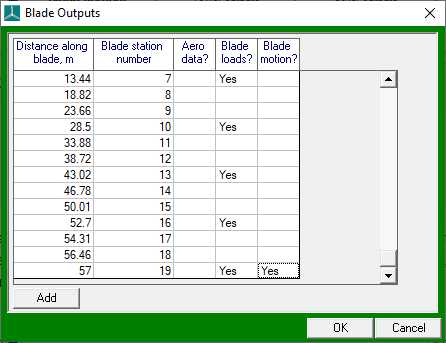
2. Use the API functions GetMeasuredBladeStationPositionX(), GetMeasuredBladeStationPositionY(), and GetMeasuredBladeStationPositionZ() to return the instantaneous position of each blade tip during the simulation. Note that these are in root axes; see Bladed user manual Section 7.21 and Figure 7-5 in particular (references are correct for latest 4.12 edition, others may vary).
3. To convert from root-axis coordinates to global, you will need to take account of the following:
- Current rotor azimuth angle, from GetMeasuredRotorAzimuthAngle().
- Blade pre-cone and pre-sweep angles, if non-zero.
- Current pitch angle of each blade, from GetMeasuredPitchAngle(). This is needed because the root axis set rotates about the Z axis with pitch angle.
4. You should then be able to calculate the tip-to-tower separation using the algorithm set out in the Knowledge Base article linked above.