When integrating dynamic states with fixed-step integrators, such as the "Explicit Newmark Beta" or "Generalised alpha", the acceleration displays greater sensitivity to variations in the time-step, as compared to the displacement and velocity. This can give the impression that the acceleration is not consistent with the velocity, as illustrated in the graphs below.
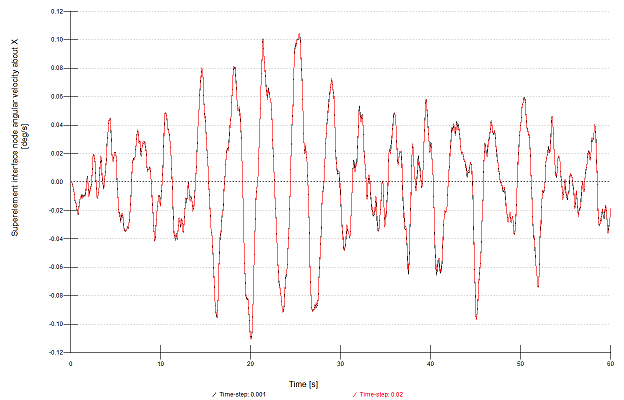
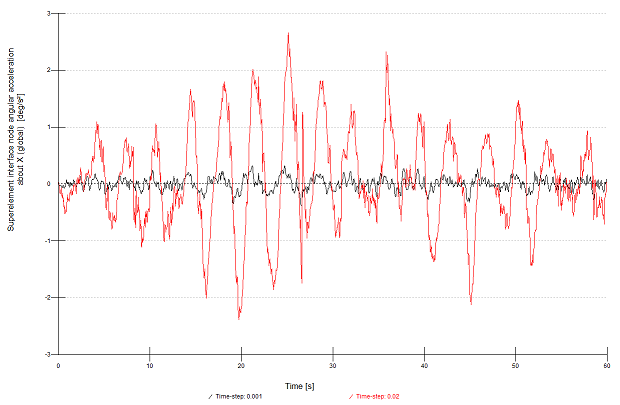
These graphs display the x-component of the angular velocity and acceleration of the interface node for an offshore turbine with a Superelement support structure.
This is generally not considered to be a problem. The time-step required to accurately capture the accelerations is usually less than the time-step necessary for the velocity and displacement to converge. When using larger time-steps, the acceleration overshoots and has a phase-shift with respect to the converged acceleration profile. The numerical equation for the velocity takes the form

The Newmark-Beta integrator uses not only the current acceleration but also the velocity and displacements from the previous time-step to calculate the current velocity. For the simulation with the 0.02 s time-step, the contribution of the acceleration to the current velocity (in the equation above) is of order 0.01. This explains why both acceleration profiles result in a similar velocity profile, even though they vary noticeably from one another.