The acceleration limits are set in the Setpoint Trajectory Planning (STP) part of the pitch actuator definition. STP determines the relationship between the “Controller demanded pitch angle” and the “Limited demanded pitch angle”. STP ensures that the “Limited demanded pitch angle” obeys the acceleration and rate limits that have been set. So, this determines the relationship between the black & red lines in the image below.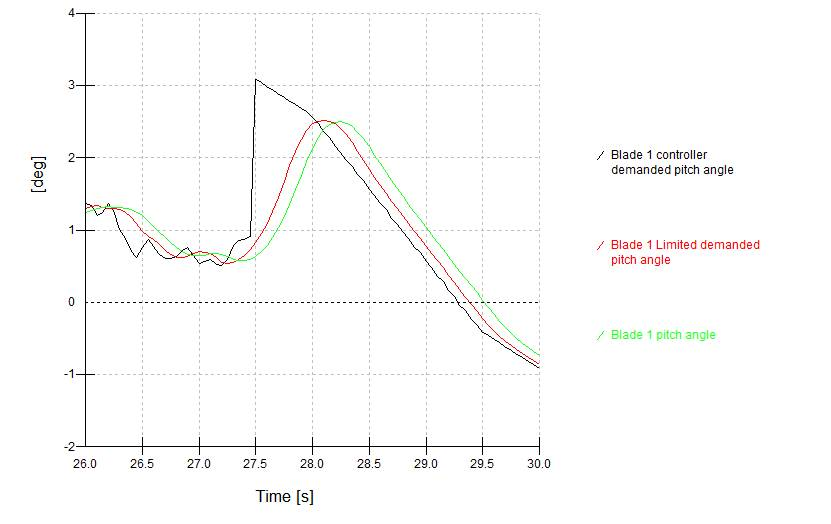
The relationship between the “limited demanded pitch angle” and the pitch angle is governed by the relationship below (image from pitch actuator screen). The pitch acceleration is calculated at each time step by rearranging this equation calculate d^2 x/dt^2. An example calculation corresponding to the time history above is given in the spreadsheet here
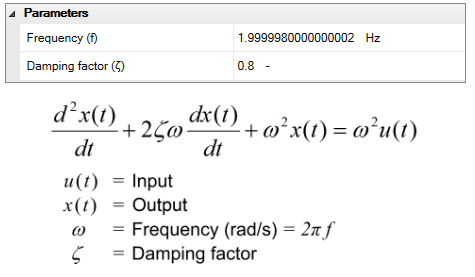
As seen above, the pitch acceleration depends on the pitch angle, pitch rate and “limited demanded pitch angle”, so this is not directly subject to the acceleration limits defined in STP.
If you want to limit the pitch acceleration, you could consider adding torque limits on the actuator, which will effectively limit the acceleration that the actuator can achieve. Alternatively, you could choose a slower pitch response (e.g. frequency 1Hz) which will result in a less aggressive response to the difference between the pitch angle and the “limited demanded pitch angle”.
Interaction with safety system: The behaviour of pitch systems when performing safety actions varies depending on the type of pitch actuator. Some pitch actuators use an entirely different control path for safety action – eg a hydraulic system might connect an accumulator directly to the pitch cylinder, bypassing any active control and therefore any acceleration limits – whereas other pitch actuators use the normal control mechanism but with demands from different sources, and so could have acceleration limits, but not necessarily the same ones as in normal operation.
The Bladed pitch actuator model is a simplified approximation and cannot represent all the details of every real world pitch system. If you wish to represent your pitch system more accurately it is recommended to implement the pitch safety action in the External Controller DLL rather than in the Bladed safety system. Then Bladed will see it as normal operation rather than safety action, and apply the Setpoint Trajectory Planning limits.
Alternatively, users could create a pitch dll to replace the Bladed pitch actuator model (but this does involve a greater amount of work than the above option).