Usually with a small enough time step, the different integrators in Bladed converge to an equivalent result. However with some turbine models this is not observed.
Why do I not get consistent results when Bladed calculations are run using different integrators?
Bladed versions affected: all Bladed versions supporting explicit and implicit integrators.
Date of last article update: 28 March 2024
-----------------------------------------------------
Summary of the issue
Simplifications in explicit integrators (Runge-Kutta, Explicit Newmark Beta and Generalised Alpha) were implemented in Bladed to ensure that calculation can run with reasonable time step and give stable results.
The simplification was to set the structural state accelerations to zero when calculating the geometric stiffness loads. However, for some blade designs (particularly very flexible) this simplification can degrade the accuracy of the solution and affect the dynamic response. Therefore, it is recommended to use the “Implicit Newmark Beta” integrator so that these terms can be included.
Explicit Newmark Beta and Generalised Alpha integrators should be used with caution due to this known simplification. The Runge-Kutta integrator is updated to include the missing terms starting from Bladed 4.16, and has an option to include the missing terms in earlier versions.
-----------------------------------------------------
Case study and further details
First of all, it is noted that the results depend on the number of blade parts being used. In Figure 1 below, the simulations were run using maximum number of blade parts (same as the actual number of blade stations - 1). When we use the maximum blade parts in Figure 1, the solutions are comparable regardless of the integrator used. This is a good indication that we have a converged and valid model.
Differences are seen in Figure 2, where the number of blade parts is reduced to 5 and various integrators are used. This is discussed further below the figure.
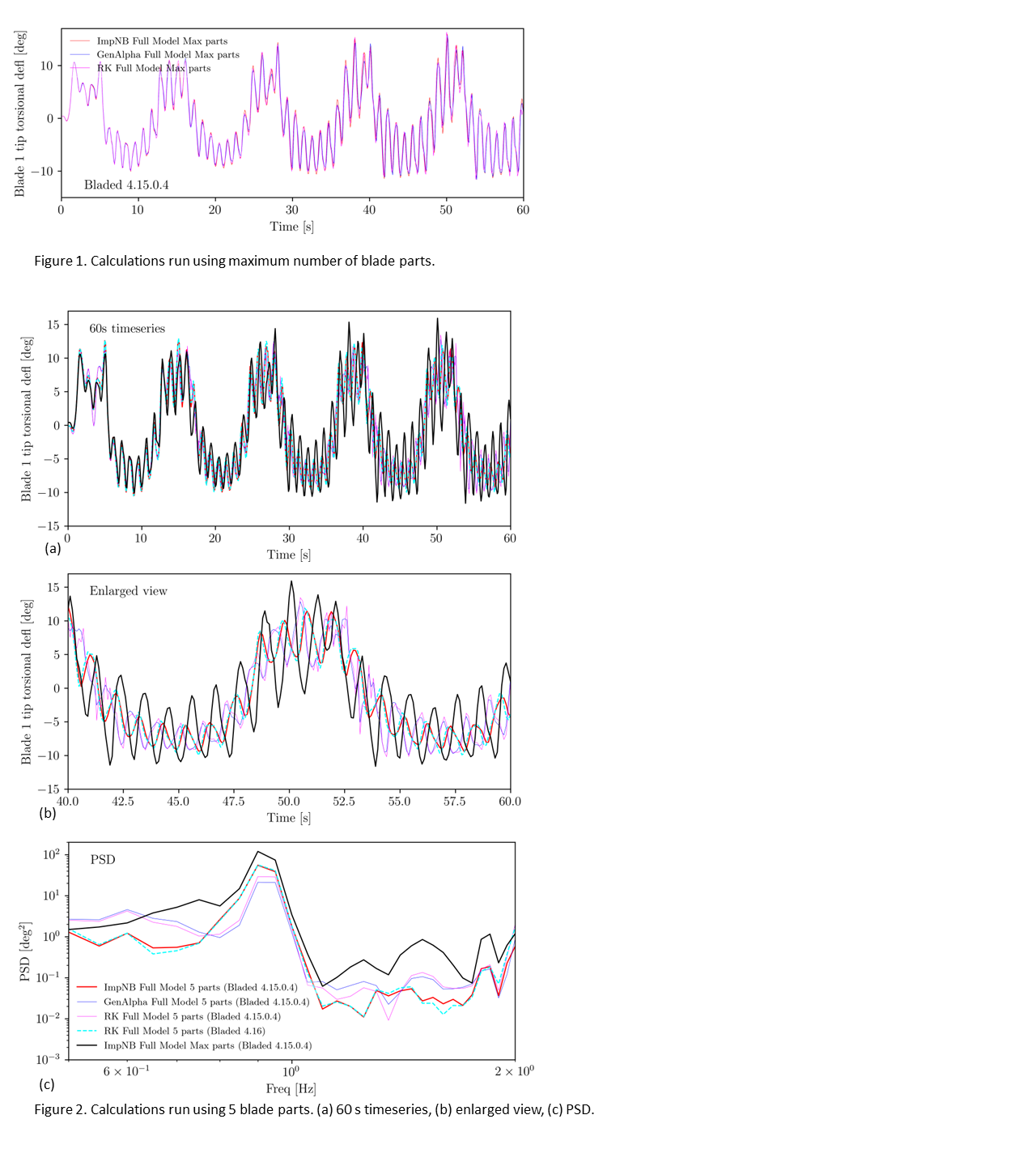
In Figure 2, all of the results are underestimating the true solution given when the using the maximum number of blade parts. However, it can be observed that the amplitudes obtained from the implicit Newmark-Beta integrator is the closest to the true value (Figure 2c). What is the reason?
With the implicit Newmark Beta integrator, Bladed includes the relative accelerations in the calculation of the geometric stiffness (the geometric stiffness model needs to calculate the deflection state by considering the inertial loads as an applied load). However, with explicit integrators (explicit Newmark Beta, Generalized Alpha and Runge Kutta in Bladed 4.15), the relative accelerations are set to zero when calculating the geometric stiffness forces. This was a necessary simplification of the problem for the fixed step explicit integrators to solve stiff problems with a reasonable time step.
This difference is the root cause of the observed differences, as the equations of motion for the geometric stiffness model are slightly different depending on the integrator type. This discrepancy yields largest differences in the results for a small number of blade parts and gradually vanishes when the blade parts are increased. Ultimately the differences are negligible when the number of blade parts is large enough, as the geometric stiffness model has little impact on the solution in this case.
Implicit Newmark Beta is therefore the recommended integrator type.
Starting from Bladed 4.16, the relative accelerations in the calculation of the geometric stiffness are included in the Runge-Kutta model. Hence, it can be seen that the results for the Runge-Kutta model in Bladed 4.16 is improved.
Note that this improvement for Runge-Kutta integrator can also be reproduced in earlier Bladed versions by adding the following code in "Project Info"
MSTART EXTRA
NumberSolveSystemIterations 2
MEND
-----------------------------------------------------
What action should users take?
1. It is recommended that users adopt the “Implicit Newmark Beta” integrator in projects in favour of “Explicit Newmark Beta” or “Generalised Alpha”.
2. When performing convergence tests for multi-part blade models, it is recommended to run some time domain tests with the maximum number of blade parts in order to establish a baseline converged dynamic response.
3. The simplification for explicit integrators is directly related to the calculation of geometric stiffness loads. To conduct investigations where geometric stiffness effects are less impactful on the simulation, the blade can be sub-divided more parts, so that deflections in each part are smaller.
-----------------------------------------------------
What action is the Bladed team taking?
From Bladed 4.16:
1. Implicit Newmark Beta is the default integrator.
2. Runge-Kutta integrator is adjusted to include the missing acceleration terms.
3. Documentation is updated to reflect the new best practice guidance.
In future versions:
Fixed step explicit integrators will be removed from Bladed in the future.